Overview
This 5-degree-of-freedom robot arm was built as a personal project to apply theoretical knowledge from university robotics and dynamics courses. The project demonstrates the complete design process from concept through fabrication and control.
The arm serves as a platform for experimenting with kinematics, dynamics, and control algorithms in a physical system.
Technical Implementation
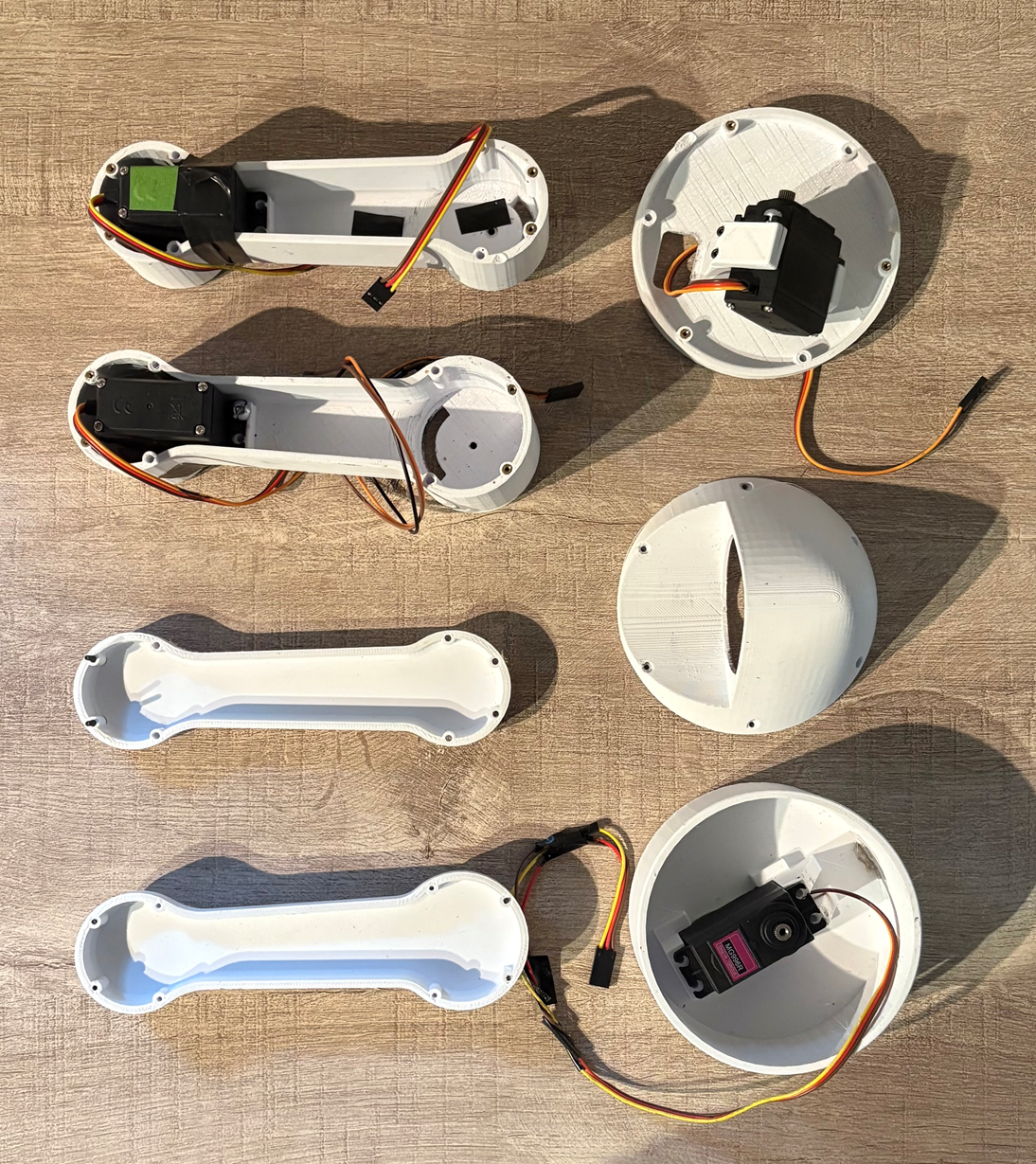
- Mechanical Design: Fully custom mechanical design with hidden internal cable routing for clean aesthetics
- Actuation: Five servo motors providing rotation at each joint for full 5-DOF movement
- Control System: Arduino Uno microcontroller with PWM control signals for servo positioning
- Cabling: Custom wire extensions and cable management to keep all wiring internal and invisible
- Dynamics Analysis: SolidWorks mass properties analysis to determine link masses and centers of mass for control calculations
Key Challenges & Solutions
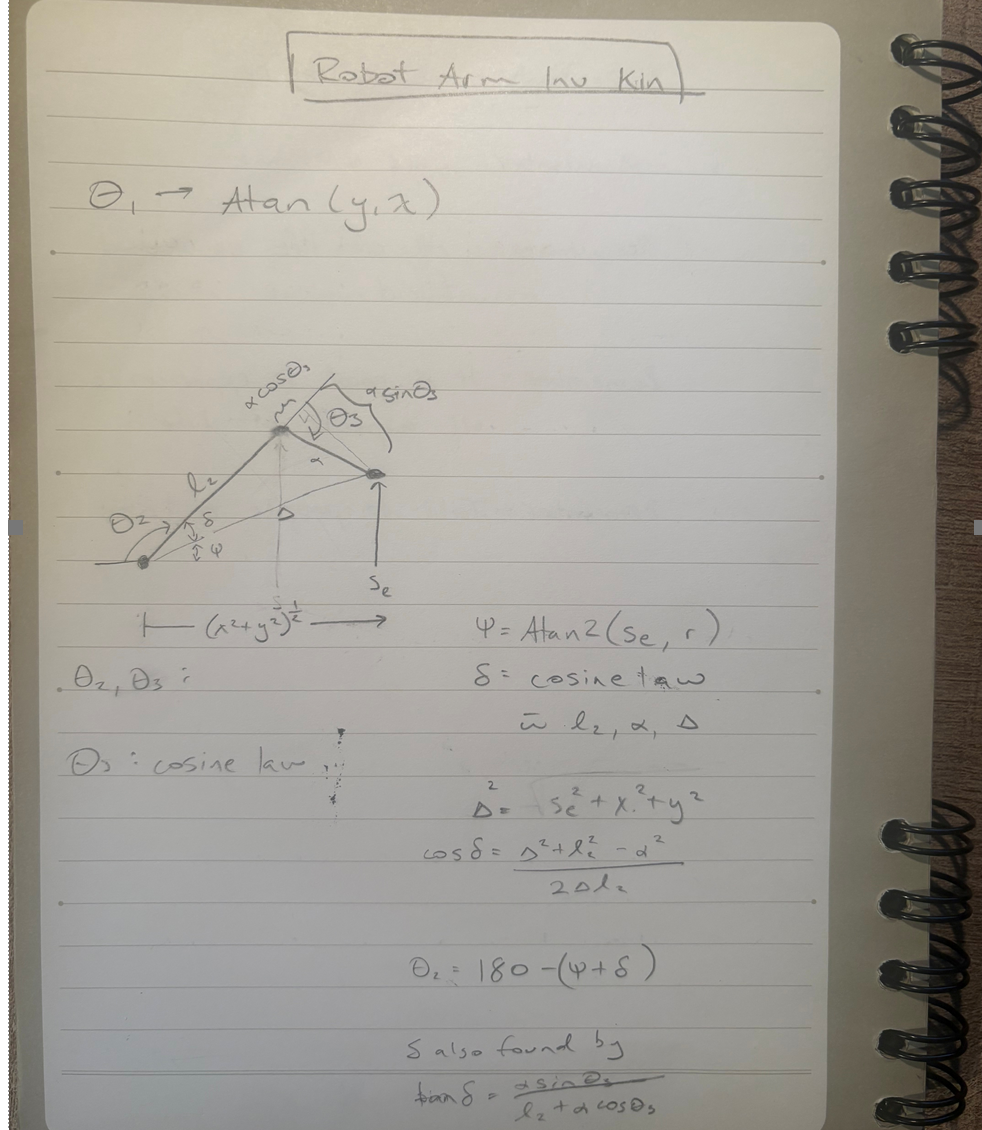
- Kinematic Modeling: Developed forward and inverse kinematics to translate desired end-effector positions to joint angles
- Cable Management: Designed internal routing system to prevent cable interference and maintain clean external appearance
- Precision Control: Implemented PID control for accurate positioning and smooth motion
- Structural Integrity: Ensured mechanical stability while maintaining lightweight design for servo capacity
Results & Impact
The robot arm successfully demonstrates 5-DOF manipulation with smooth, controlled motion. The project provided hands-on experience with the complete robotics design cycle and validated theoretical concepts from coursework.
This build serves as a foundation for future robotics projects and experimentation with advanced control algorithms.